李培根:物理生命体——漫话数字时代的智能装备
到底物理生命体因何而生命?传感器、自动执行器虽然是必不可少的,但真正使一个物理实体具有“生命力”的,乃“数字孪生体”所致。某种意义上数字孪生体即物理生命体的魂之所在。
数字孪生体又具有哪些主要功能——因之使物理实体而“生命”?
数字孪生模型当然包括物理生命体的三维结构模型,但它显然不是物理生命体的要点。下面是赋予物理实体“生命”的几个要素。
多领域物理建模。孪生模型应该反映物理产品内在的运行规律。对自身全生命周期内的状态和“生命”运动规律的的认识,也就是物理生命体“自我意识”的表现。复杂机电系统往往是多领域物理(机-电-液-热-磁-控等)综合集成系统,传统的产品开发方式是各领域设计者分别设计其相对独立的部分,然后综合。设计过程中虽有总体考虑,且相互讨论协商,但终究难以掌握系统各部分耦合的复杂情况。因此,需要基于多领域知识、面向多学科协同优化的新一代数字化设计方法与技术以及面向复杂机电系统产品的多领域建模与仿真软件和工具。产品的数字孪生模型中可能含有反映产品不同物理特性的模型,如计算流体动力学模型、结构动力学模型、热力学模型、应力分析模型、疲劳损伤模型以及材料状态演化模型(如材料的刚度、强度、疲劳强度演化)等。如何将这些基于不同物理属性的模型关联在一起,是建立数字孪生,继而充分发挥数字孪生模拟、诊断、预测和控制作用的关键。如构建激光加工装备的数字孪生模型,就应该深入到光与物质相互作用的机理。如果孪生模型具有包含功率/光谱/力/热分布等耦合物理量的全过程仿真能力,这样的激光加工装备自然具备很强的“自我意识”,也就能保证更好的加工性能。
仿真。数字化模型的仿真技术是创建和运行数字孪生体、保证数字孪生体与对应物理实体实现有效闭环的核心技术。仿真是将包含了确定性规律和完整机理的模型转化成软件的方式来模拟物理世界的一种技术。只要模型正确,并拥有了完整的输入信息和环境数据,就可以基本正确地反映物理世界的特性和参数。
优化。数字孪生模型的优化能力是物理产品的智能之重要表现。如一条流程工业中的生产线,在其生产过程中实现自感知、自决策、自执行,包括生产过程中参数的最优控制等。其优化手段不仅包括经典和现代的优化控制技术,甚至还可以融入大数据和人工智能技术。
设计过程中往往更需要优化技术,应用于产品开发设计过程中的数字孪生模型自然应该具有优化能力。拓扑优化设计(topology optimization design)的基本思想是利用有限元技术、数值计算和优化算法,在给定的设计空间内,寻求满足各种约束条件(如应力、位移、频率和重量等),使目标函数(刚度、重量等)达到最优的孔洞连通形式或材料布局,即最优结构拓扑;多学科优化设计(multidisciplinary design optimization,MDO)旨在解决大规模复杂工程系统设计过程中多个学科耦合和权衡问题的一种新的设计方法。它充分探索和利用工程系统中相互作用的协同机制,考虑各个学科之间的相互作用,从整个系统的角度优化设计复杂的工程系统。
基于数据和案例的学习能力。物理生命体的智能应该具有学习能力。有的学习方式建立在基于案例的推理(case-based reasoning)能力,如前面提到的智能注塑机的自学习能力。数字-智能时代最好的学习方式还体现在从数据中发现潜藏的规律。一个复杂的机电系统中很多相互关联的因素往往连领域专家们也难以意识到,基于大数据的深度学习方法能够发现那些潜藏的关联。总之,具有学习能力的孪生模型能够使物理装备变得越来越聪明,也是物理生命体最重要的“自我意识”。
基于模型的系统工程(MBSE)。孪生模型的构建当然需要从系统出发,其构建过程应该是基于模型的系统工程。模型特指描述待研究对象的一种形象化的表达方法:把对象特性抽取出来,使用标准化的表达方式进行描述,从而能够进行进一步研究。传统的系统工程是“基于文本的系统工程”(text-based systems engineering,TSE),而MBSE是建模方法的形式化应用,以使建模方法支持设计开发乃至全生命周期阶段,或曰在产品的孕育及服役的全生命周期。在具体实现上,INCOSE(International Council on Systems Engineering,国际系统工程协会)联合对象管理组织(OMG)在统一建模语言(unified modeling language,UML)的基础上,开发出了适宜于描述工程系统的系统建模语言(system modeling language,SysML),软件提供商也开发了相应的支持SysML的工具,并且把SysML的建模工具和已有的专业分析软件如FEA、CAD等进行了集成,提出了MBSE的整体解决方案。MBSE下系统模型成为各专业学科模型的集线器。各专业学科的模型已经被大量应用于工程设计的各个方面,但模型缺乏统一的编码,也无法共享。建模工作仍处于“烟囱式”的信息传递模式,形成了一个个的“模型孤岛”,没有与系统工程工作流良好结合。在MBSE下,系统模型成了各学科模型的“集线器”,各方人员围绕系统模型开展需求分析、系统设计、仿真等工作,便于工程团队的协同工作。这就使整个设计团队可以更好地利用各专业学科在模型、软件工具上的先进成果。【1】可以想见,在MBSE方法和工具下开发的物理装备更具“生命力”。

一个装备在其运行过程中的动态无疑决定了它的性能与质量。通常工程师们只能凭对动态的有限认知在设计开发阶段有所考虑,但更多地其实是用静态的知性实体思维去考察装备的存在。哲学家们早已认识到普通人思维的弊端。黑格尔把世界理解为一种未完成的流动性存在,没有任何不变的本质,一切都处于永恒的变化过程中;海德格尔认为,传统哲学思维方式就是将一切“存在”都对象化为固定的、僵死的东西,所以他看待存在的本真面目,则从静态视角转向动态。【2】装备的设计与使用非常需要这种思维。过去,装备的设计者和使用者即使有这种意识,但苦于手段的限制也难有作为。在数字-智能时代,数字孪生使人们有可能从动态的视角透视装备的全生命周期。
物理生命体的数字孪生,其“孪生”意义主要在于“生命”的孪生,也即“生命”过程的孪生,而几何及运动学意义上的数字孪生是次要的。正如从医学角度看,人体的数字孪生主要不是一个人的外貌和身体动作的孪生,而是反映人的健康体征的各种指标(如血压、血糖、血脂、呼吸、心跳……)变化过程的孪生。对于一个物理装备而言,数字孪生模型对装备“生命”过程的呈现一般发生在装备的孕育(产品设计开发)或服役阶段。
好的装备设计应该是基于对其工艺过程深刻认识的基础上。因此,为了设计高性能的装备,往往需要对装备运行的物理过程进行仿真。如激光加工设备的设计,就可以考虑建立激光与材料相互作用过程的数字孪生模型,通过仿真对激光材料加工过程有更深刻的认识,如此“孕育”出的装备一定有更好的性能。装备的此种数字孪生本质上是装备运行物理过程的数字孪生。
装备服役过程中通过实时采集运行过程中的数据(孪生数据,包括环境数据)而建立的数字孪生模型是装备这一“物理生命体”自我意识、自适应环境变化的关键。对运行过程中孪生数据的处理和分析使装备系统能感知自身工作状态和健康状态,进而进行相应的控制或运行维护。
“生命”的过程总是在特定的环境中存在的。如风电装备的运行过程与风场环境紧密相关,因此风电设备的孪生数据理应包括风场的数据;车间装备的节能和加工精度显然与温度环境有关,因此车间装备的孪生数据理应包括车间温度环境乃至天气的相关数据。
“生命”的过程往往与伙伴联系在一起,如一个拖拉机的运行可能同时与其他的拖拉机以及收割机、旋耕机等联系在一起,那么拖拉机的孪生数据就应该包括反映与伙伴设备工作联系的某些数据。
“生命”的过程与装备服务的对象联系在一起,如一个手术机器人,其孪生数据理应包括病人在手术过程中的相关数据。
“生命”的过程与装备的操作者或使用者的行为联系在一起。如在一台挖掘机的运行中,其孪生数据包括挖掘机操作者的操作数据,通过孪生模型进行仿真,可告知操作者如何改进操作有可能提高工作效率或节能;手术机器人的孪生数据收集应该包括医生的操作数据,同样通过孪生模型的仿真使医生优化其操作机器的过程。有些情况下(如运行操作、维护维修)记录使用者的操作数据,对其操作进行轨迹跟踪,藉此建立的数字孪生模型还有特别的用途。通过对同类型的物理装备但不同操作者的孪生数据进行大数据分析,能够发现,怎样的操作才是最优的?从而进一步规范操作。好的数字孪生模型不仅能够沉淀人的经验,而且有可能衍生、演化出最优的路径。
“生命”的过程数据不仅包括装备运行过程的数据,还包括在“孕育”过程(设计、制造以及装配过程)中的数据,它为物理装备“生命”的过程留下了痕迹。“孕育”过程中的历史数据使人们有可能追溯产品的质量问题。
通过对装备全生命周期过程历史数据的分析,有可能发现某些人们原来并未意识到的关联,从而可指导装备的改进设计甚至创新。
既然数字孪生的意义在于“生命”过程的孪生,“数字孪生体” 就被时间规定,这是以前的数字样机或虚拟样机等数字模型完全不具备的特性。物理生命体所有的活动和“存在”都具有时间性,犹如海德格尔言“此在”的时间性。海德格尔还认为存在的本性是“去存在”(to be)。【2】数字孪生作为一种数字存在,它是物理生命体的魂,它自然会关注装备下一刻的状态,未来的状态演化。这也是物理生命体的“思”之所在。
总之,数字孪生的意义本来就不是基于处理静态问题。装备的运行过程都是动态的,只有在对动态过程更深刻认识的基础上并施与相应控制或维护,其“生命”的意义才更美好。这才是物理装备真正需要的。
言才是人的主人”。【3】不是人有语言,人构成或操作语言,而是言谈、语言本身此刻现身为人。“语言就是存在之家,就是为存在所居有并且由存在来贯通和安排的存在之家”。语言不为人所拥有,语言为存在所拥有,语言聚集着存在,显现着存在。【4】 把语言视为人的主人,大概因为语言伴随着“思”,而“思”则体现着存在。再看看物理生命体的存在——孪生数字是否可以视为一种语言?它是否真正是物理生命体的主人?的确,真正的数字孪生模型是物理装备自我意识的体现。海德格尔的哲学中有“此在”的概念,意指人。“这种存在者,就是我们自己向来所是的存在者,就是除了其他可能的存在方式以外还能够对存在发问的存在者。”【5】传统的物理装备没有能力对自身的存在“发问”,它对自身过去、现在及未来的存在都缺乏理解。而数字-智能时代的含有数字孪生体的物理装备(物理生命体)则大不一样。在某种意义上,数字孪生体不仅能够对自身的存在“发问”,而且能够比它的创造者——人更能对物理生命体(物理装备)的存在“发问”!也就是说,物理装备的数字孪生体比装备的设计者和使用者更深刻地认识装备。我们有理由认为,数字孪生模型便是“发问”的语言。
今天的数字孪生模型大多停留在对物理生命体自身状态的认识和简单的控制,人们完全可以期待未来的融入某种智能工具之数字孪生模型可能具有创造能力。
美国MIT的科学家Allan Zhao等为机器人的设计提出了机器人语法RoboGrammar,被称为25年来的最高成就!
RoboGrammar的操作分为三个顺序:定义问题;制定可能的机器人解决方案;选择最佳模型,如下图所示。通过这些步骤,RoboGrammar可以设计数十万个潜在的机器人结构。可以看到,它不是常规的辅助设计,而是辅助甚至提供创意。只要人提出需求,它便会提供最完美合适的机器人形状。【6】
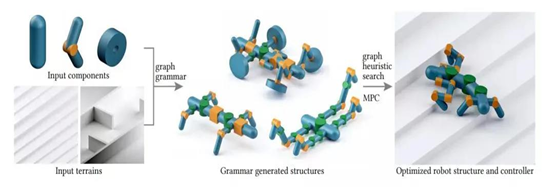
RoboGrammar操作的三顺序【6】
RoboGrammar中包含的“图形语法(GraphGrammar)”是对机器人组件排列的一系列约束。例如,相邻的支腿应该用一个关节连接,而不是用另一个支腿相连。这样的规则确保至少设计是在初级水平上,每个计算机生成的设计作品都是可以工作的。图形语法规则基于节肢动物的启发,例如昆虫、蜘蛛和龙虾等。
Zhao声称,“启发式功能会随着时间的推移而提高,并且将搜索收敛到最佳机器人。”
由Zhao等人的工作可以联想,未来含有智能工具的数字孪生模型不仅能够为产品的开发提供创意,也将使物理产品或装备在其运行中真正能够自主地做出创造性的工作,即可能做出超越人类期望值的工作。
显然,RoboGrammar或GraphGrammar就是一种语言,一种真正体现智能的、一种真正“聚集着存在”(聚集着潜在的最优机器人形状的存在)的语言。
构建数字孪生体,就应该使数字孪生真正成为一种语言,一种决定物理装备真正“存在”的语言,一种使物理装备具有自我意识的语言,一种真正使物理装备成为物理“生命体”的语言。既把它视为“语言”,就需要进一步的规范定义,从而方便数字孪生体的构建。

参考文献:
[1] 陈红涛,等.基于模型的系统工程的基本原理[J] .中国航天,2016(3).
[2] 闫顺利,敦鹏.存在过程论与过程哲学的对话-海德格尔和怀特海的过程观比较[J].昆明理工大学学报:社会科学版,2009(2).
[3] 海德格尔.演讲与论文集[M].孙周兴,译.上海:三联书店,2005:153.
[4] 海德格尔.路标[M].孙周兴,译.北京:商务印书馆,2000:370,392.
[5] 海德格尔.存在与时间[M].陈嘉映,王庆节,译. 上海:三联书店:2006:9.
[6] ZHAO A,et al. RoboGrammar: Graph Grammar for Terrain-Optimized Robot Design[J]. ACM Trans. Graph.,2020,39(6).